Reachable Coverage: Estimating Saturation in Fuzzing [ICSE 2023]

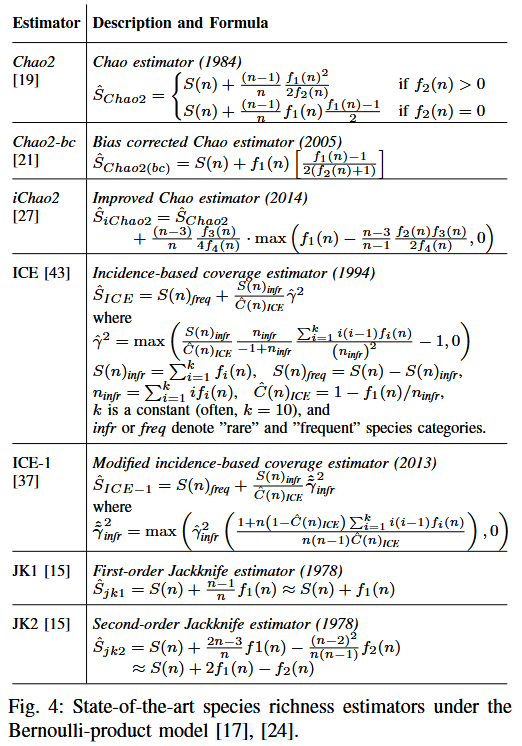
精确估计 Fuzzing 在每个目标程序中的可达元素个数(边, 分支, 块等) 是不可判定问题, 因此需要使用统计学方法来估计一个近似值, 依次判断 fuzzer 的有效性. 论文评估了多个 SOTA 估计器在 fuzzing 上估计可达元素个数的效果, 并提出应该用 Bernoulli-product model 来建模 fuzzing campaign 的 N 个输入与覆盖元素 S 之间的关系, 然后用 Chao, ICE, JK 等系列估计器来估计目标程序的可达覆盖元素个数的下界, 而非精确值.
Methods
Evaluation
RQ.1 (Ground truth). For programs where we know the reachable coverage, how do existing species richness estimators perform as approximators of reachable coverage?
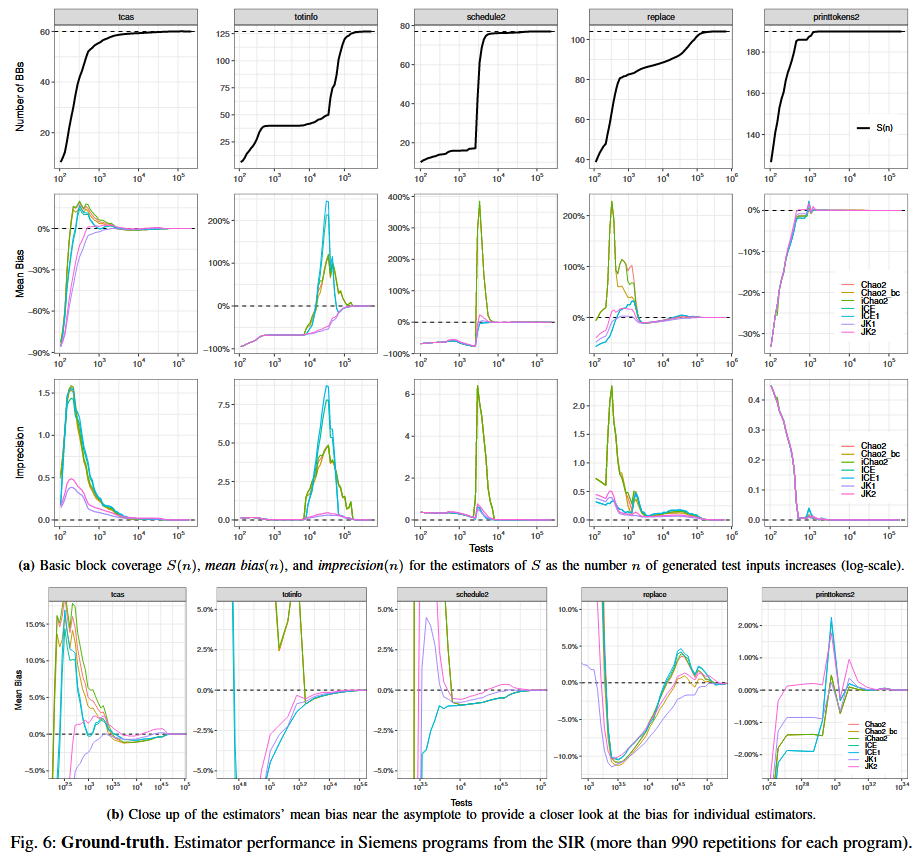
在最初的“预热”阶段之后, 除 iChao2 以外, 所有估计器对可达覆盖率的估计平均来说都是偏高的, 但偏差控制在 15% 以内. 所有估计器在渐近意义上都是一致的, 也就是说, 随着样本数 $n$ 的增加, 它们的偏差大小会逐渐减小. 对于那些规模足够小、使得其渐近极限 (真实可达覆盖上限) 可以被精确知道的程序, Jackknife 估计器的表现最好.
RQ.2 (Real world). For real-world programs, how do existing estimators perform as approximators of reachable coverage?
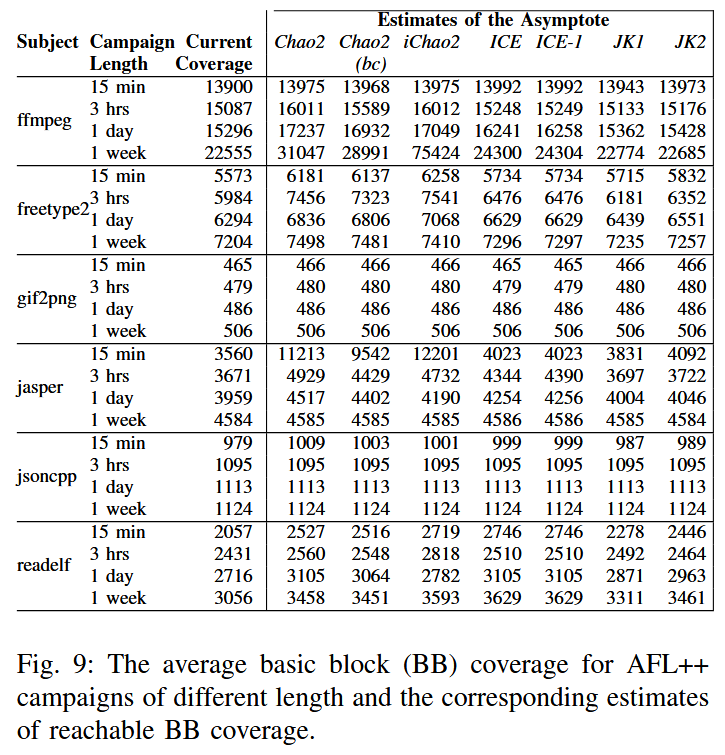
所有被评估的估计器都会预测出虚假的峰值: 在大多数情况下, 即使达到它们所预测的可达覆盖上限之后, 依然还能取得更多的覆盖. 所有估计器都对 $S$ 做出了偏低的估计.
RQ.3 (Bootstrapped ground truth). For real-world programs, where we “force” a known asymptote by bootstrapping, how do existing estimators perform?
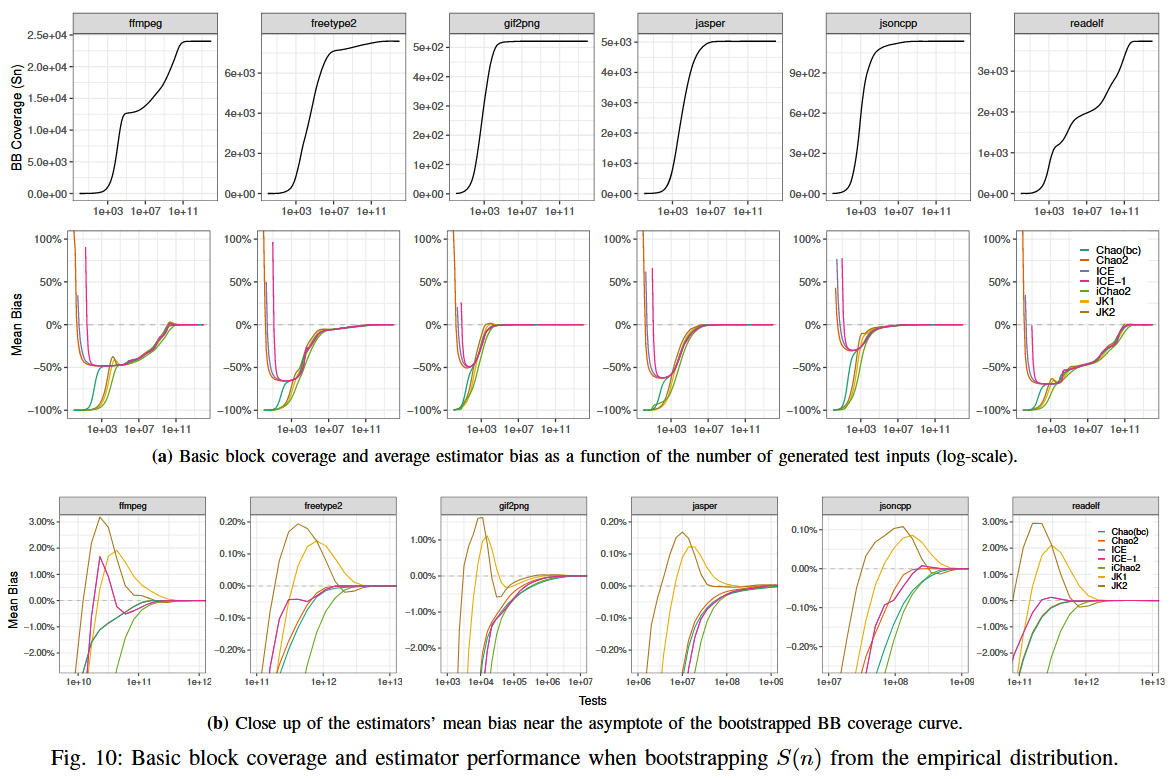
在实验活动 (campaign) 的早期阶段, 由于在对数时间尺度上看不出任何明显的渐近趋势 (asymptote) , 所有估计器都会产生虚假的峰值预测 (与 RQ.2 中的情况相同) . 然而, 随着实验持续时间的增加, 这种系统性的负偏差会逐渐减弱, 从而体现出所有估计器的渐近一致性. 在经历了最初的“预热” (burn-in) 阶段之后, 所有估计器对可达覆盖率的预测都能控制在 ±3% 的误差范围之内. 在所有被评估的估计器中, Jackknife 系列的表现最好 (与 RQ.1 中的结论一致) .
Conclusions
对于静态分析, 我们发现, 即便是工业界和学术界开发的最先进工具, 在可达覆盖率上也存在严重的高估或低估. Fuzz-Introspector [16] 由 Google 开发, 用来衡量 fuzzer 的有效性;SVF [51] 则由 Sui 课题组开发, 目标是在过程间可达性分析中最大化精度. 然而, 它们给出的近似结果都难以被可靠地解释. 实际上, 这些结果具体到底偏差多大很难确定, 而且也无法仅仅通过“把分析跑久一点”来动态改进精度. 对于估计方法, 我们发现, 与其他最先进的估计器相比, Jackknife 估计器 [15] 在偏差和方差方面都最小. 一阶 Jackknife (JK1) 的计算方式是: 将已覆盖的代码元素数量与只出现一次的元素数量相加, 得到估计值 . 在实际可达覆盖率 真正被达到之前的 1–2 个数量级区间内, 估计值 与真实 的平均差异始终保持在 的 之内. 举例来说, 如果真实的 需要 30 天才能达到, 那么 Jackknife 估计器大约在第 3 天左右就能给出 这样精度的估计. 然而, 在不知道 真值的情况下, 我们发现, 在 fuzzing 活动的早期阶段, 所有估计器都会预测出虚假的峰值: 当达到估计的可达覆盖率 时, 总是还可以获得更多覆盖, 即 . 在假定“分析是完全的”的前提下, 静态分析最多只能给出 的一个上界 (除非验证问题在实践中是可行的) . 与此相反, 这些被评估的最先进估计器只能给出一个下界. 正如本文所示, 在这两种情况下, 我们都很难精确判断这两类方法分别在多大程度上高估或低估了 . 不过, 与静态分析不同的是, 估计方法始终可以通过延长 fuzzing 活动的时间来不断改善这个下界. 在实践中, 我们建议同时使用这两种方法.
References
[16] O. Chang, N. Emamdoost, A. Korczynski, and D. Korczynski, “Introducing fuzz introspector, an openssf tool to improve fuzzing coverage,” https://openssf.org/blog/2022/06/09/ introducing-fuzz-introspector-an-openssf-tool-to-improve-fuzzing-coverage/, accessed: 2022-08-15.
[51] Y. Sui and J. Xue, “Svf: interprocedural static value-flow analysis in llvm,” in Proceedings of the 25th international conference on compiler construction. ACM, 2016, pp. 265–266.